

Разрабатываем, производим, поставляем оборудование и ПО для геофизических работ
XTOMO-LM 3 — система сейсмической томографии
XTOMO-LM 3 — система сейсмической томографии, дополненная средствами интерпретации слоистой модели. Программа разрабатывается и поддерживается компанией XGeo.
Система сейсмической томографии XTomo-LM служит мощным 2D-инструментом интерпретации времен прихода сейсмических волн, их моделирования или, иначе, кинематической интерпретации сейсмических данных.
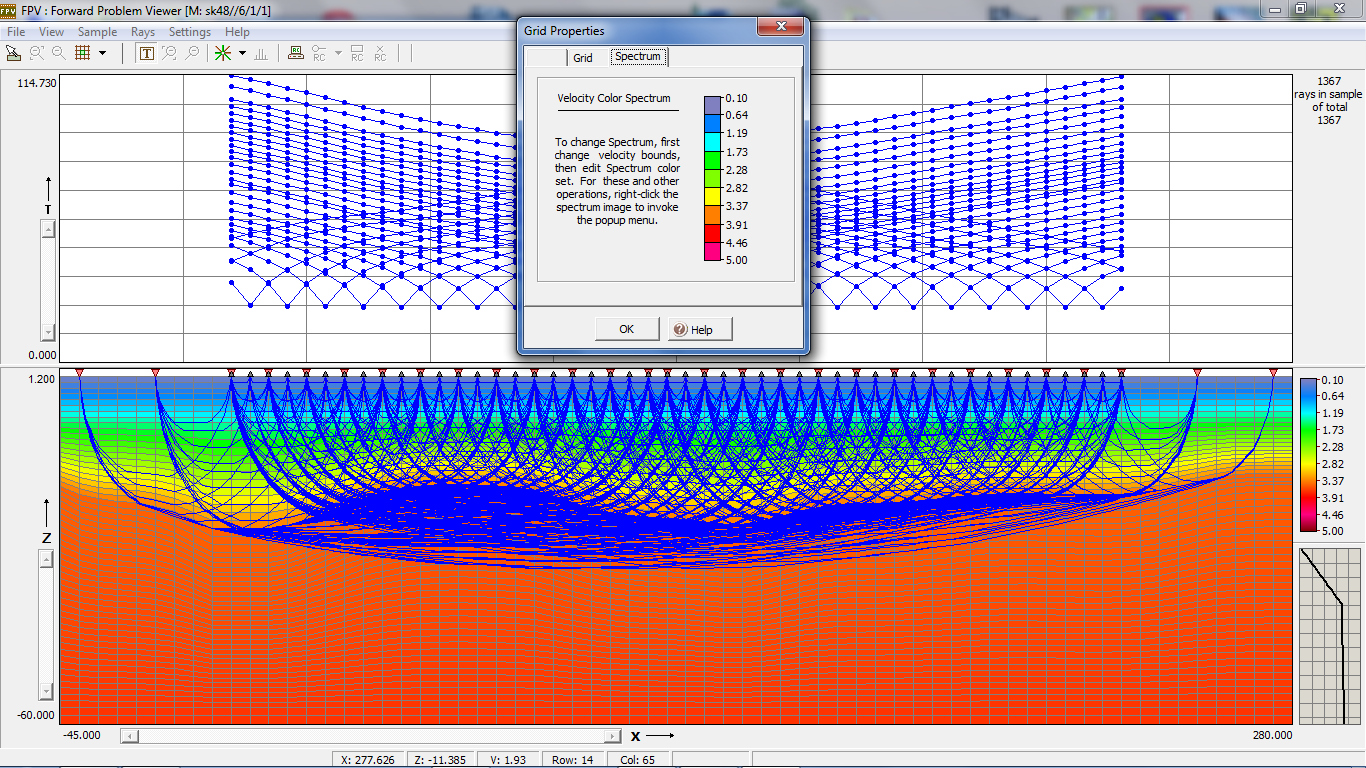
XTomo-LM использует решетку первого порядка (first order mesh) в качестве базовой сетки для задания скорости. Кратко ее можно описать, как совокупность точек, полученных от пересечения множества вертикалей семейством простых кривых без общих точек. Такая геометрия решетки позволяет естественным образом моделировать сейсмические пласты и горизонты, наклонные или криволинейные.
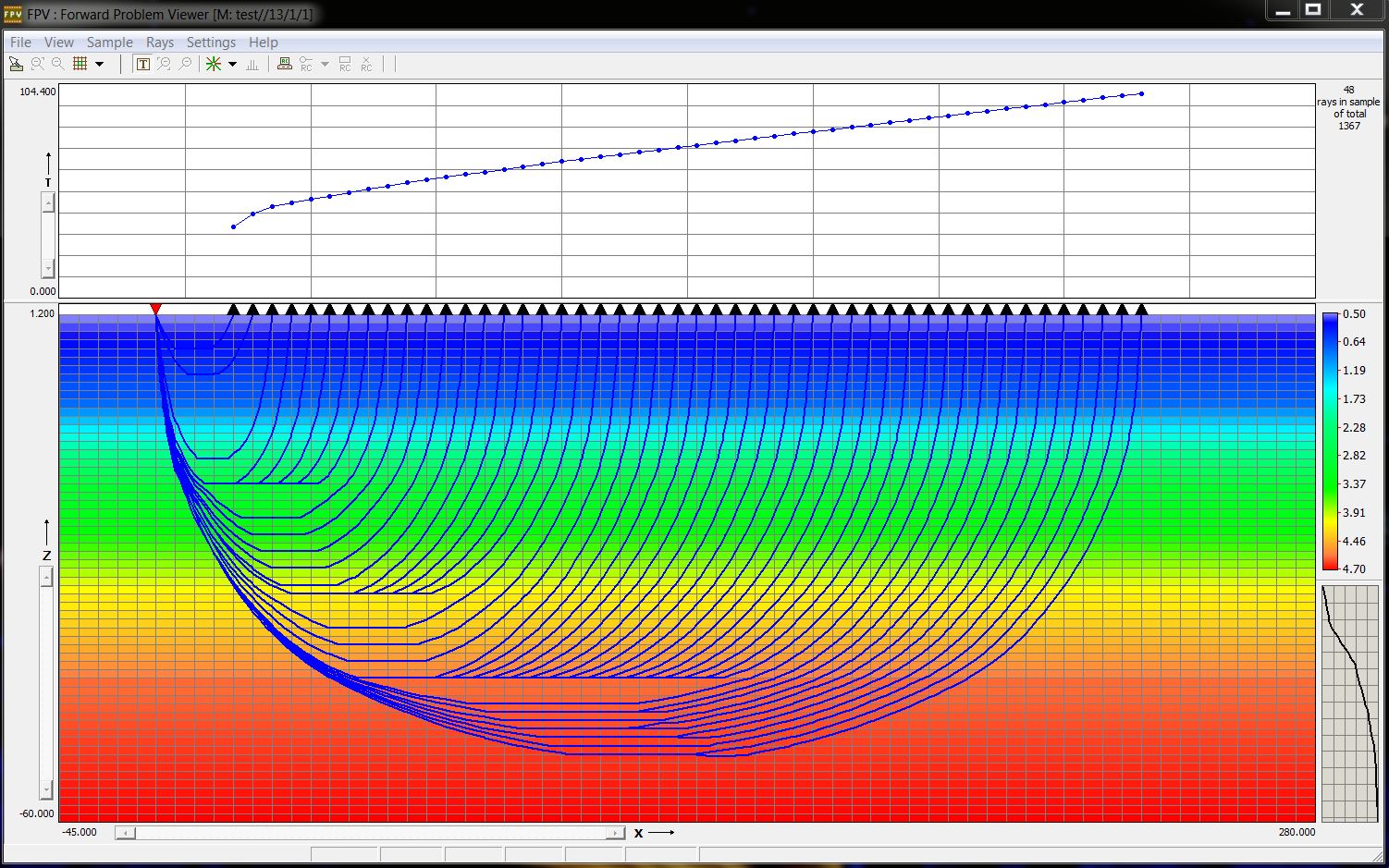
XTomo-LM работает не только с проходящими рефрагированными волнами (diving waves), но и с вторичными волнами: отраженными, головными и обменными. Таким образом XTomo-LM способна кинематически моделировать распространение волн в слоистой среде и находить оптимальное распределение скорости посредством томографического обращения. Кроме того, система реализует новые алгоритмы обращения систем годографов отраженных и головных волн.
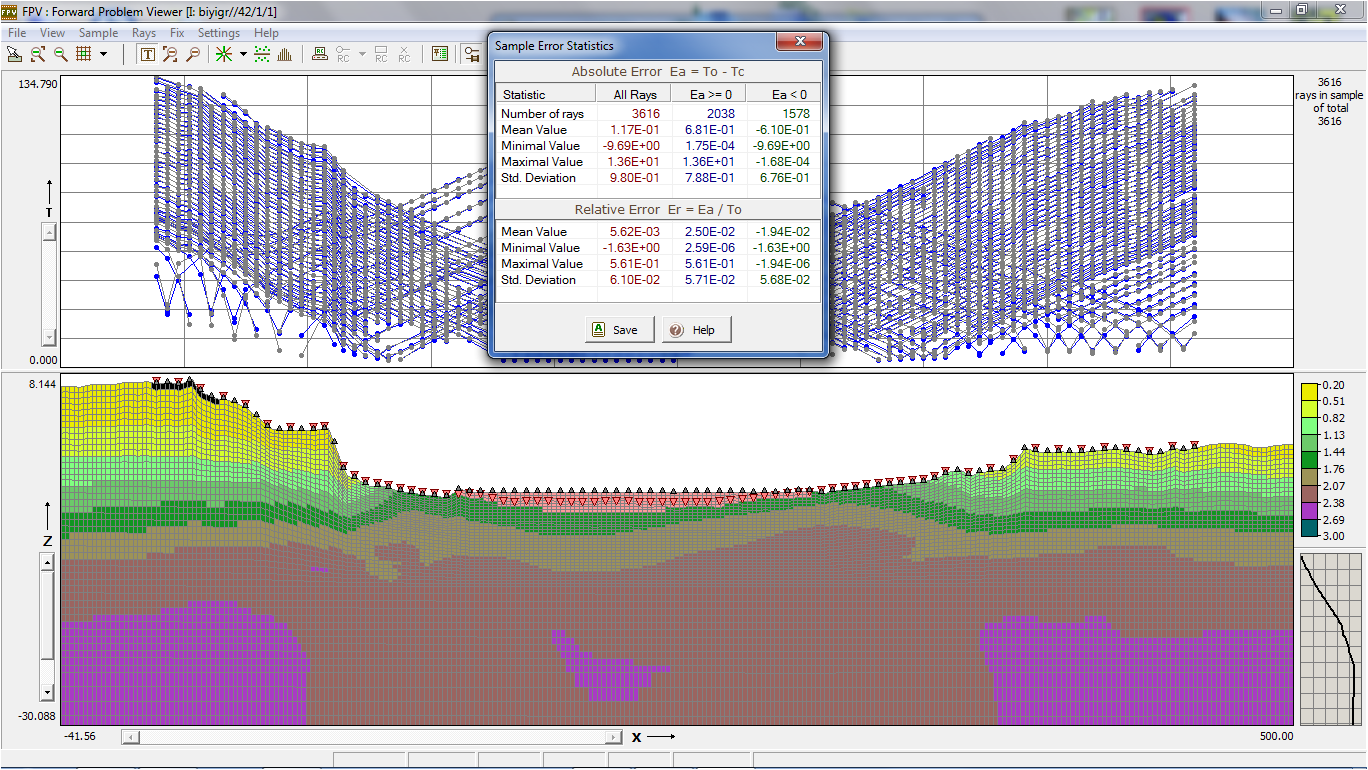
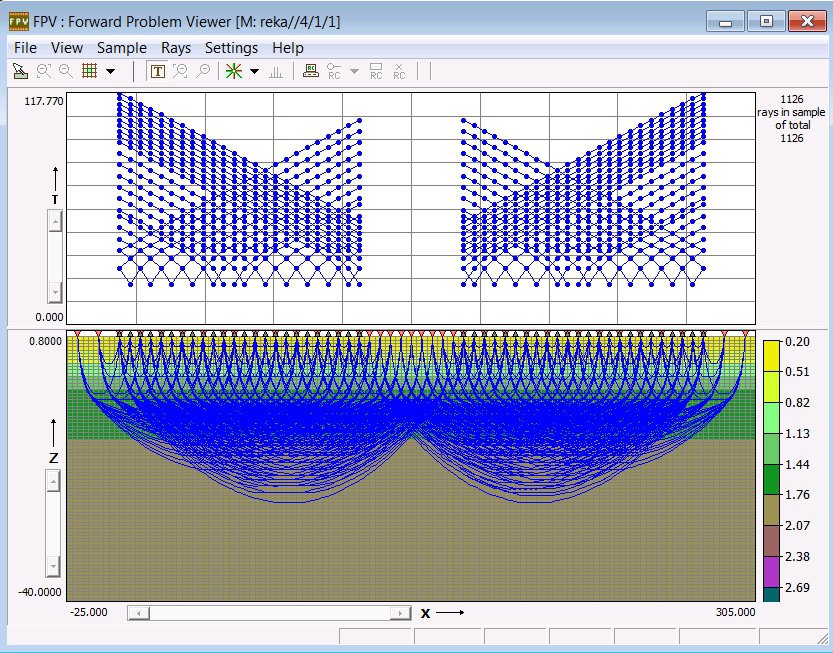
XTomo-LM включает мощные средства визуализации как модели так и лучей и годографов, визуальные средства редактирования модели, а также средства анализа лучей, результаты которого важны для определения скорости. Система позволяет косвенно наблюдать за распространением волнового фронта по решетке. Система имеет встроенные средства импорта изображений и их печати в заданном масштабе.
Благодаря продуманной архитектуре, XTomo-LM поддерживает многовариантную обработку с хранением промежуточных данных. Это свойство особенно важно для обработки геофизических данных, связанной с выбором наиболее правдоподобных решений.
Основные типы задач, решаемые с помощью пакета сейсмической томографии XTomo-LM:
- Сейсмическое зондирование различного масштаба, начиная от изучения глубинного строения Земли и кончая вопросами инженерной сейсмики: для получения сглаженного изображения осадочных слоев, оконтуривания аномальных зон, прослеживания местоположения инженерных объектов, фундаментов и т.п.
- Коррекция cтатики при работах МОВ-ОГТ
- Межскважинное просвечивание и мульти-офсетное ВСП для выявления зон трещиноватости, прослеживания угольных пластов, определения положения фронта горения при добыче нефти с использованием процесса внутрипластового горения, для контроля процесса скважинной гидродобычи и т.д.
- Сейсмомониторинг народнохозяйственных объектов: для контроля за изменением состояния инженерных сооружений с течением времени
DPU — cистема подготовки данных
В качестве входных данных для томографии (шире — для интерпретации) XTomo-LM принимает текстовый файл формата SRT с временами пробега волн между парами источник-приемник. При масштабных работах составление такого файла по полевым материалам является самостоятельной задачей. Для ее решения служит Data Preparation Unit (DPU), поставляемая как отдельный продукт. Входными данными для DPU служат сейсмические записи в виде набора сейсмограмм ОПВ и данные позиционирования. Последние либо записаны в заголовках трасс, либо поставляются в трех текстовых файлах в соответствии с моделью "shots-stations-relation".
Задачами DPU являются:
- Импорт входных данных
- Создание Базы данных геометрии
- Считывание времен вступлений различных волн с сейсмограмм
- Экспорт в XTomo-LM в виде файлов SRT
Важным моментом является переход от исходных 3D координат (обычно UTM) к 2D координатам, в которых работает XTomo-LM. При этом, если речь идет о данных 2D профилирования, то DPU исходит из пессимистических предположений относительно условий наблюдений, которые обуславливают отклонения точек постановки устройств от планового профиля. Фактически, DPU строит строго профильную систему наблюдений с сохранением удалений, обеспечивая корректность последующей кинематической интерпретации. Построение Базы данных геометрии происходит без участия пользователя при создании проекта DPU.
Считывание времен вступлений реализовано как интерактивная процедура, достаточно комфортная для пользователя с точки зрения пользовательского интерфейса и особенно простая при считывании первых вступлений. Если же интерпретационная модель является слоистой, каждая считанная ось синфазности относится к указанной волне. Результатом является SRT файл, в котором сохраняется волновая принадлежность наблюдений. Это дает возможность использовать разные волны для решения разных задач интерпретации в XTomo-LM: строить общий скоростной разрез, строить сейсмические горизонты, изучать скорость в слоях.
DPU позволяет выводить решение кинематической прямой задачи XTomo-LM на сейсмограммы сразу после построения Базы данных геометрии. DPU и XTomo-LM обеспечивают решение задачи о вводе статики в данные МОГТ при наличии исходных записей и данных позиционирования.
Программы включены в Единый реестр российских программ для электронных вычислительных машин и баз данных:
- Seismic Tomography System with Tools for Layered Model Study (XTomo-LM 3) включена в Реестр по Приказу Минкомсвязи России от 09.03.2017 №103, реестровый номер 2937
- Data Preparation Unit for Seismic Kinematic Inversion (DPU 3) включена в Реестр по Приказу Минкомсвязи России от 09.03.2017 №103, реестровый номер 2945
Программное обеспечение
Инструкции и методические материалы